

横Gセンサーの考案で「アテーサE-TS」実用化への道が開く
世界一を目指した日産BNR32型スカイラインGT-Rの走りを支えるため開発された最新デバイスが、電子制御トルクスプリット4WD「アテーサE-TS」。今回は、アテーサE–TSの生みの親の一人である松田俊郎に、その実用化への道を語ってもらおう。

松田曰く、「アテーサE–TSの原型は1985年の東京モーターショーに参考出品されたCUE–Xに搭載されたE–TSで、中央研究所(現総合研究所)の内藤源平らが考案したシステムです。この機構は最初から完成度が高く、試作車に乗った誰もがその走りに驚き、わたしもこの機構は絶対にモノになると確信しました」とのこと。





1985年に発表された日産CUE-X。そのフォルムは後に市販されたインフィニティQ45に近い。
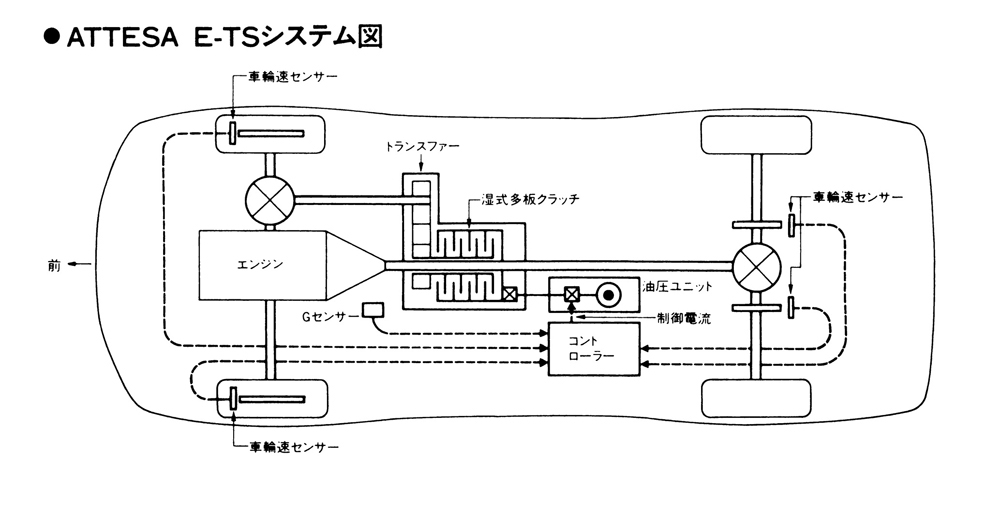

アテーサE–TSの機構はイラストの通り。トランスミッション後端に組み込まれたトランスファーに湿式多板クラッチが内蔵され、通常はその多板クラッチをフリーとすることでFRとなっているが、後輪のスリップを感知すると、アクチュエータ、ウィズドロワルレバーを介して、湿式多板クラッチからセンタードライブシャフトにトルクが伝達され、チェーンによって、フロントドライブシャフトを回転させる。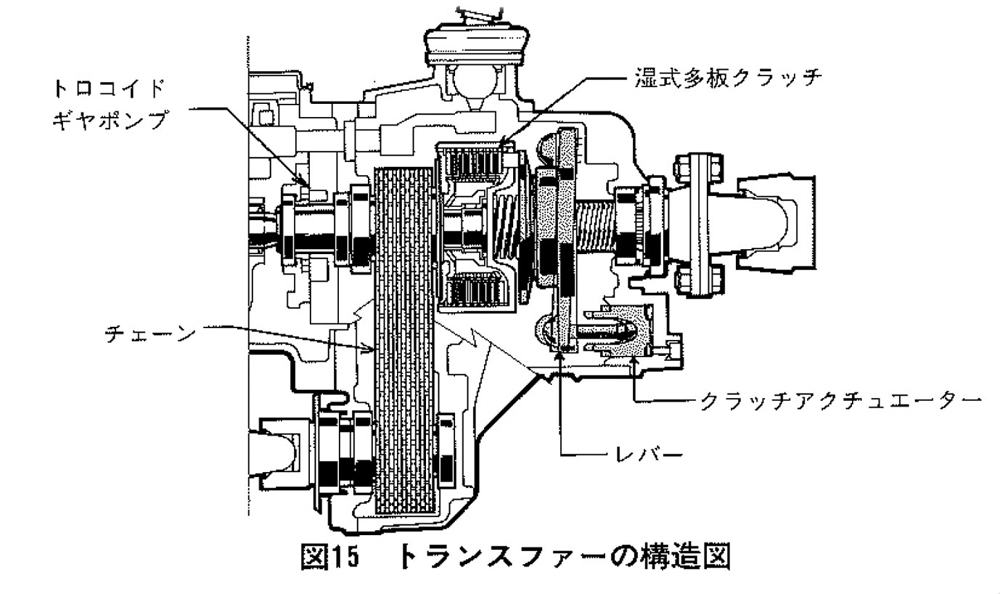
前輪に伝わるトルクの強弱は、湿式多板クラッチを押し付ける荷重を変化させることで制御。その走りはどんな路面状況下でも弱アンダーステアで走れるようにセットしているが、その路面状況の判断は横Gセンサーが受け持っている。



日産自動車・シャーシ設計部第4シャーシ設計課・主任技師・松田俊郎
「当時のシャシー設計部に『意のままにコントロールできる』というキャッチフレーズがあり、その最高峰を目指したのがBNR32型スカイラインGT–Rです。4WDの採用が決まっていたため、その理想に到達するためにはアテーサE–TSが必要不可欠でした。システムの基本概念は中央研究所でほぼ完成していましたが、ドライ路面だけでなく、雨/雪/氷などのさまざまな路面状態に適合して最適な駆動力制御を実現することが大きな課題でした。その対策として、わたしが横Gセンサーの採用を提案したのです」


机上の論理は80%。残りは人の感性で作り上げる
「駆動力配分の最終的なセッティングは加藤博義(日産のテストドライバー)が行いました。机上で性能を予測できるのは80%程度で、特にコーナリングの限界領域では4つのタイヤに働く力が複雑に変化するので難しいのです。そこで、加藤の試走に同乗し、走行中のコメントを詳しく聞いてから、その走行データを分析し、加藤の言う意味とデータの関係を理解した上で、一つ一つ制御ロジックに落とし込んでいきました」
路面μ(摩擦)の違い/速度差/ステアリングを切ったときの車輪の左右差を複合的にミックス。しかも4輪それぞれで測定するという地道な作業を繰り返し、完成までに約3年の月日が必要であった。
「とにかく、加藤博義なくして、R32(スカイラインGT-R)が完成することはありませんでした。 彼が道を切り開いたからこそ、走りの性能世界一が実現できたと思います」。 

未知の機構を商品化するためにあらゆる路面における操作、挙動のデータ取りが必要だった。加藤博義(写真)の努力なくして完成はなかった。加藤は2003年に厚生労働省管轄の「現代の名工」を受賞、翌2004年には「黄綬褒章」を受賞。


路面μの違いを判断するための横Gセンサー、制動性能の高度化を図るための前後Gセンサーは、センターコンソールボックスの下に内蔵される
さらにBNR32は横Gセンサーに加えて前後Gセンサーも採用している。前後Gセンサーの主な目的はABSの完璧な制動性能を確保するためにスリップ検知力を高めている。仮に4輪が空転し、実際の車速と4輪の回転速度がズレた場合、実際の車速と加速度の相関関係データを入力し、正しい制御を行うようにしている。つまり、4WDとABS用コンピュータは相互通信を行い、統合制御をすることで、運動性能を引き上げている。

「ただ、クルマの運動性能最優先で作った結果、R32では結果として燃費を犠牲にしています。多板クラッチを押すための圧力をためるアキュームレーターはその数値が設定値以下に落ちると常時蓄圧するのですが、その際に電気をかなりロスします。また、R32/R33は4WDの切り替え時の応答性を高めるため、駆動配分を完全に0:100にはしていません。弱くつなぐことで、アクセルを強く踏んだときのリヤの空転を抑えますが、駆動ロスは当然発生してしまいます。ちなみにR34では、予測制御を加えることで、完全に0:100となっています」


BNR32型スカイラインGT-Rの油圧ユニットはリヤデフの上にマウント。コンピュータからの信号で、ためた圧力をトランスファーのアクチュエータに送る。E-TSのコントロールユニットはトランク内上部の助手席側にある。2つのマイコンが内蔵され、4WDとABSを統合制御を行っている。
アクセルを踏んでいればスピンしない
そのほか、急制動時にもエンジンブレーキの力のみを50:50に駆動配分し、低μ路での横滑り防止と車両の安定性を高めるなど、挙動変化を抑えるように徹底的に手が加えられている。
「どんな路面でも速く走れる、コーナリング性能が高いというのがアテーサE–TSの一番の訴求部分。ただ、技術的にいえば全天候型の性能を持たせています。駆動力による悪さを全部自動制御して、ドライバーはアクセルとブレーキ、そしてステアリングのみに集中できます。基本に忠実な操作でいいと思いますが、唯一必要なのはコーナーではスピンを恐れずにアクセルを踏む勇気ですね」

路面のμを横Gセンサーで感知することであらゆる路面で最適な駆動配分を実現。低μ路でも抜群の安定感を見せる。日産のFRベースの4WDの基本システムは現在も大きく変わっていない。
湿式多板クラッチの寿命についてはどうだろう?
「開発初期の段階で一番の懸案事項となったのも多板クラッチのライフでした。研究段階で問題ないことが実証されています。普段はほとんど駆動配分が0:100ですし、通常の走りでは油圧を弱くつないでいますので、プレートが滑ることはほとんどありません。ただ、サーキットなどの限界走行で、後輪が勢いよく空転してしまうような場合は、回転しているものをいきなりつなぐので、プレートは摩耗します。それを繰り返すと摩擦係数が落ちて滑りやすくなります」
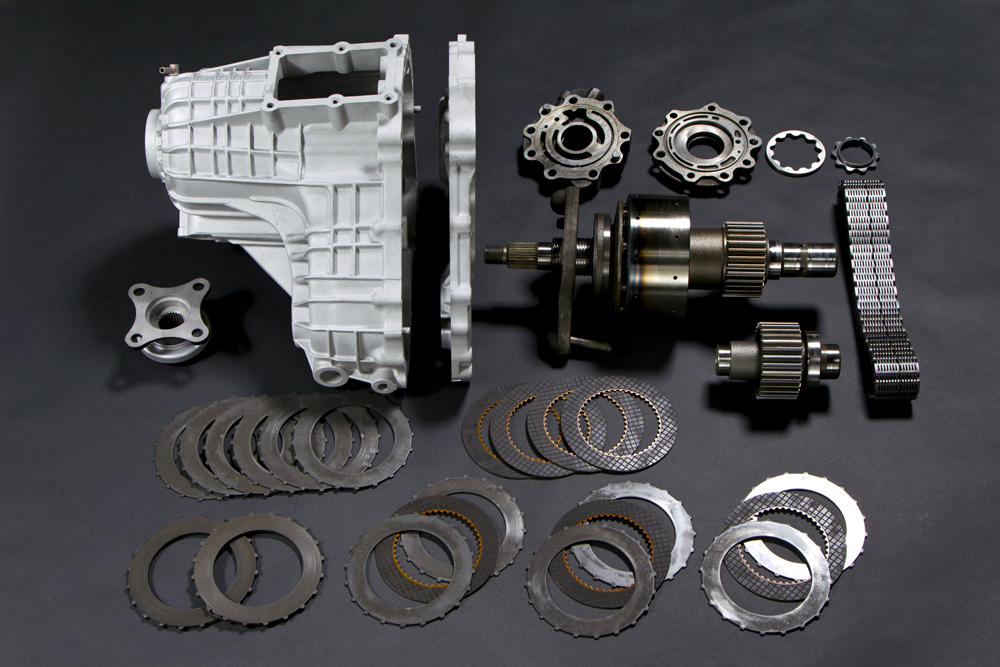
多板クラッチは7枚のドライブプレートと12枚のドリブンプレート、2枚のリテーナープレートにより構成。フロントへはチェーンを介して、トルクを伝達する。
ちなみにグループAレースに参戦したBNR32型スカイラインGT-Rは、エンジンのパワーがノーマルの2倍に引き上げられているので、リヤの空転を抑えるためにより4WD傾向の強いセッティングに変更。駆動配分特性も市販車と同じにはできず4段階に固定した。さらに横Gセンサーの検知能力も2Gまで引き上げられ、高いコーナリング性能に対応している。

グループAのマシンは高出力に対応するため、横Gセンサーの感度を高め、制御領域をチューニングし、積極的に4WDになるような特性になっている。これはサーキット走行する場合も効果がある。ただし、変更するのは横Gの大きな領域のみだ。
「われわれの開発したE–TSの特性はあくまでもストリート用。一般オーナーがどんな路面でも安全で安心して走れることを主眼にセットしていますが、サーキット派のオーナーには横Gが大きくなる領域のゲインを高めることが走行性能を高める上で有効でしょう。開発段階でも各サーキットで少しフィーリングが異なりました。駆動配分コントローラーなどを使ってオーナーの好みに合わせた特性を見つけられれば、駆動ロスが減り、走らせることがより楽しくなるのではないでしょうか。これは日産を退職したから語れることでしょうけどね」と笑う。 

完成したBNR32型スカイラインGT-Rの走りは、重量配分の問題もあり、本来の理想よりも少しアンダーステアであった。松田は後輪の左右の駆動配分に着目し、R33型スカイラインの開発に合わせ「アクティブLSD」を完成させた。


R33型スカイラインGTS25タイプM。リヤ左右輪の駆動配分を電子制御するアクティブLSDを設定
「開発時、常に考えていたのは人とクルマの関係の最適化でした。クルマの挙動を人が理解して、人がクルマを動かすループの関係をいかに作るか。それが意のままにコントロールできる、というキャッチフレーズにつながりました。32はその人とクルマのいい関係を実現できたと思います。だから今なお多くの方に愛されるのでしょう。そうしたクルマの開発に携われたことを幸せに思います」 溢れんばかりの笑顔の奥に世界最高の4WDを作った男の自信を垣間見た。 (文中敬称略)
(レポート:GT-Rマガジン編集部)
【関連記事】





