

























































多種多様SUV ほんとに悪路を走るにはどれがいいのか
1990年代にアメリカではじまり、2000年に入って欧州へ飛び火。その後、日本のマーケットにも大きな影響を与えている「SUVブーム」。その中心にあるのはオンロードでの走行性能や快適性を中心に考えたモデルで、悪路をバリバリと走るために生まれたSUVは実は少ない。
とはいえ、なかには「道なき道を走りたい!そのためにSUVを選ぶ」という人もいることだろう。そこで、本気で悪路を走るためにはどんな性能が必要なのかを考えてみよう。
悪路を走れるための「3条件」を満たすSUVを探そう
まず結論から言うと、悪路走破性を高めるために必要な基本条件は3つ。「最低地上高」「接地性」「トラクション性能」だ。
最低地上高は、車体と路面の隙間を示す数値で、数が大きければ大きいほど車体と地面が接触しにくくなるので走破性が高まる。高い段差や深い溝、そしてコブが多くあるような路面になればなるほど、最低地上高が効いてくるのだ。
また最低地上高が高まれば、基本的には(加えてバンパー形状などにも左右されるが)アプローチアングルやデパーチャーアングルと呼ばれる進入や脱出時の路面の傾斜も、より深い角度である状況への対応も可能になる。ちなみにこの最低地上高の数値はカタログの諸元表に記載されている。
最低地上高は一般的なセダンやミニバンで150mm程度。いっぽうで生粋のオフローダーであるトヨタ・ランドクルーザーは225mm、ジープ ラングラーは200mm、そしてスズキ ジムニーは205mmを確保。意外なところではマツダCX-5やボルボV60クロスカントリーなども210mmとたっぷり用意している。
接地性は、タイヤをどれだけ路面に接地させることができるかである。タイヤをしっかりと路面に接地させなければ、駆動力が伝わらない(=前後に動けない)のだ。
これは一般的にはホイールストローク(路面に応じてタイヤが上下に動く量)に左右され、悪路走行を前提に作られたクルマとそうでないクルマでは大きく差がつく。なぜなら、サストロークを大きく確保にして足の動きを自由にすればするほど悪路走破には強みとなるが、動きが大きすぎると舗装路での高速走行では安定性やハンドリングで不利となるからだ。
つまりどんな路面を想定して設計されたかによって方向性が決まるので、本格オフロード走行を考えているクルマほど有利だ。たとえばジープ・ラングラーの一部グレードでは、スイッチ操作でスタビライザーを切り離すことでホイールストロークの自由度を飛躍的に高める機能まで備わっている。
そして最後のポイントとなるトラクション性能は、タイヤが路面へ力を伝えられる能力といえる。スリップや空転を防ぐために直結可能な4WDやLSD、そしてデフロックなどのメカニズムが求められるのだ。たとえばメルセデス・ベンツGクラスなどは、フロント、センター、そしてリヤと3つのデフギヤすべてにデフロックを用意して、どこか1輪でもタイヤが路面に接していれば前へ進めるように考えられているほどである。
ちなみに、1輪だけで路面に駆動力を伝える状況では、その1輪にすべてのエンジントルクがかかる。つまりそれでも壊れない頑丈な駆動系が必要となり、そのぶんのコストも増すのだ(デフロック装置そのものコストも必要)。だから本格悪路走行を前提にしたクルマでないと搭載できない。
まとめると、路面と車体が接しないように最低地上高を高くし、十分なホイールストロークを確保してタイヤが路面から浮くのを防ぎ、そのうえでタイヤが空転しないようにすれば、悪路走行に強いクルマが出来上がる。
テクノロジー進化で悪路走破はさらなる次元へ
しかし、昨今は少し状況が異なる。
理由は、悪路走行用のトラクションコントロールやスタビリティコントロール(ブレーキ制御)など電子制御による空転防止の仕掛けの普及だ。それらを活用し、従来のようにデフロックなどの機械に頼らなくてもトラクションを稼げるようになったのだ。
また、それらの電子デバイスはどこかのタイヤが地面から離れても、空転を防いで接地しているタイヤへ効率よく駆動力を送ることも可能とした。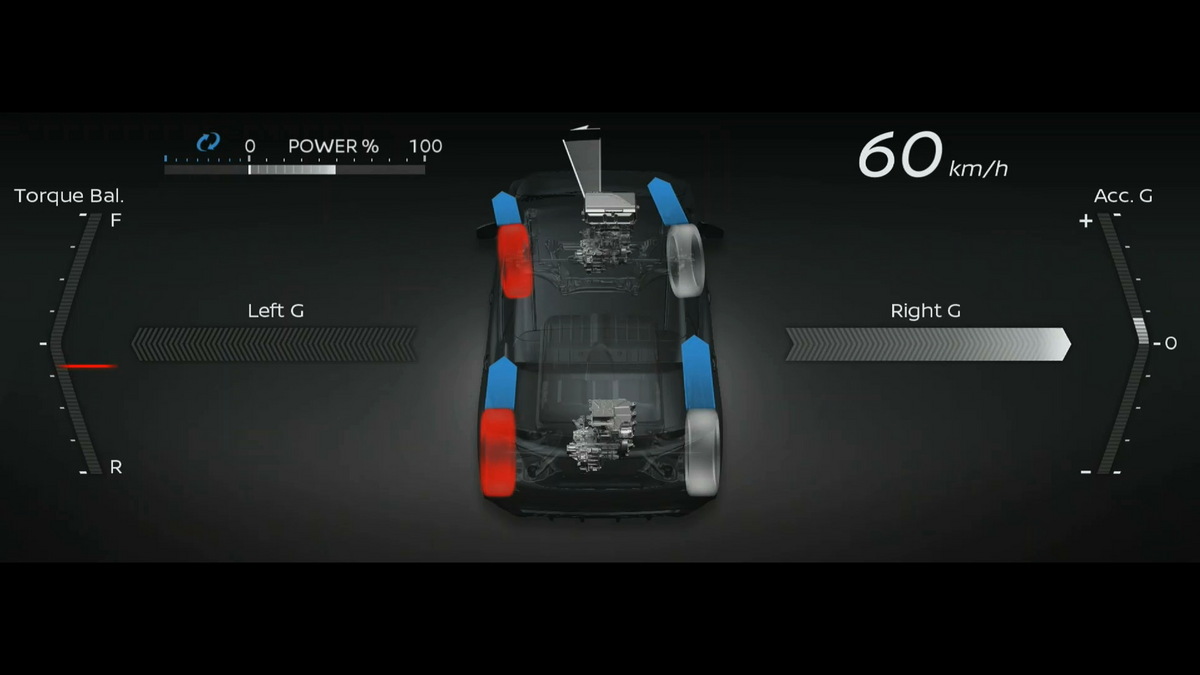
その結果、一部の限られたモデルでは従来ながらの方法で高い悪路走破性を誇っているものの、多くのクルマは電子制御(単独もしくは十分なホイールストロークなどとの合わせ技)により高い悪路走破性を手に入れているのが昨今のSUV事情でもあるのだ(ただし最低地上高は電子技術ではフォローできない)。
ところで、SUV発祥の地であるアメリカでは乗用車販売の約半分がSUVで、毎年800万台ほどのSUVが納車されている。しかし、その大部分が2WDだと知れば、SUV=4WDというのは単なるイメージに過ぎないことがわかる。本国といえるアメリカでも、多くのユーザーは悪路走破性を気にしてSUVを選んでいるわけではないのだ。